
Манипулятори ёрирасонро инчунин манипулятори пневматикии тавозуни бо қувваи барқ, крани пневматикии тавозуни ва пуркунандаи мувозинат меноманд. Ин як дастгоҳи навест, ки бо нерӯи барқ барои амалиётҳои каммасраф ҳангоми коркард ва насби мавод истифода мешавад. Ин манипуляторест, ки бо пневматикӣ ёрӣ мерасонад ва дастӣ идора мешавад. Истифодаи манипуляторҳои ёрирасон метавонад шиддатнокии меҳнати операторонро коҳиш диҳад, ба кори сабук ва ҷойгиркунии дақиқ ҳангоми коркарди қисмҳои кори вазнин ноил шавад ва бехатарии таҷҳизот ва операторҳоро таъмин кунад. Манипулятори ёрирасон асосан барои кӯмак ба коргарон дар коркард ва васлкунӣ истифода мешавад ва таҷҳизоти коркарди бо нерӯи барқ мебошад, ки шиддатнокии меҳнатро коҳиш медиҳад. Он принсипҳои эргономикро муттаҳид мекунад ва интиқоли мавод, коркард ва васлкуниро бо мафҳумҳои бехатарӣ, соддагӣ, самаранокӣ ва сарфаи энергия таъмин мекунад. Дар ҷараёни интиқол, таҷҳизот тавассути як схемаи ҳавоии мантиқӣ идора карда мешавад, ки вазни худи ашёи вазнинро ба қувваи хурди дастӣ табдил медиҳад, ҳаракат, интиқол ва васлкунии ашёҳои вазнинро дар ҳама гуна мавқеъ дар фазои корӣ ба осонӣ амалӣ мекунад, ва халли масъалаи наклиёт ва монтажи саноатй бехатар ва самаранок. Таҷҳизоти фармоишии ғайристандартӣ метавонанд амалҳоро ба мисли гирифтан, интиқол додан, паррондан, бардоштан ва васл кардани қисмҳои корӣ (маҳсулот) анҷом диҳанд ва ашёҳои вазнинро дар мавқеъҳои пешакӣ муқарраршуда зуд ва дақиқ васл кунанд. Онҳо барои борфарорӣ ва борфарории мавод ва васлкунии истеҳсолӣ беҳтаринанд. Таҷҳизоти ёрирасон метавонад меҳнатро сарфа кунад ва самаранокии корхонаро беҳтар кунад.
Манипулятори ёрирасони қувваи сахт аз мизбони мувозинат, дастгоҳи дастгир ва сохтори насб иборат аст. Он метавонад вазнҳои гуногунро аз 20 то 300 кг мувозинат кунад ва барои амалиёти интиқоли мавод мувофиқ аст. Хусусиятҳои мувозинати пурра ва ҳаракати ҳамвор ба оператор имкон медиҳанд, ки коркарди қисмҳои корӣ, ҷойгиркунӣ, васлкунӣ ва дигар амалиётҳоро ба осонӣ иҷро кунад. Он устувории баланд, кори оддӣ, самаранокии баланд, иҷрои баланди бехатарӣ дорад ва бо дастгоҳи муҳофизати гази бурида муҷаҳҳаз шудааст. Қисмҳои асосӣ ҳама аз брендҳои машҳури байналмилалӣ сохта шудаанд ва сифат кафолат дода мешавад. Он дорои функсияи пурраи таваққуф аст ва кор кардан осон аст; мувофиқи принсипҳои эргономикӣ истеҳсол карда шудааст, барои кор бароҳат ва қулай аст; тарҳи сохторӣ модулӣ аст ва назорати ноҳиявӣ ҳаво интегралӣ; сарфи мехнат 50 фоиз кам, хосилнокии мехнат 85 фоиз кам ва самараи истехсолот 50 фоиз зиёд мешавад; мувофиқи сарборӣ ва инсулт, онҳо фармоишӣ шудаанд ва дар шаклҳои гуногун барои қонеъ кардани ниёзҳои гуногун меоянд. Доираи татбиқи манипуляторҳои ёрирасон: ба таври васеъ дар боркунӣ ва борфарории анборҳо дар саноати автомобилсозӣ, саноати кимиё, бастабандии маҳсулот, саноати асбобҳои барқӣ, саноати сантехникии сафолӣ, масолеҳи сохтмонӣ ва мебел, қисмҳои металлӣ, истеҳсол ва коркарди мошинҳо, Корҳои такрории баландбасомади коркард, гази табиӣ ва энергетикаи нафт, батареяи нави энергетикӣ, логистикаи автоматӣ ва дигар соҳаҳо, ки бо крепперҳои гуногун муҷаҳҳаз шудаанд, он метавонад коркард ва паллетизатсияи маҳсулоти шаклҳои гуногунро дар соҳаҳои мухталиф амалӣ созад.
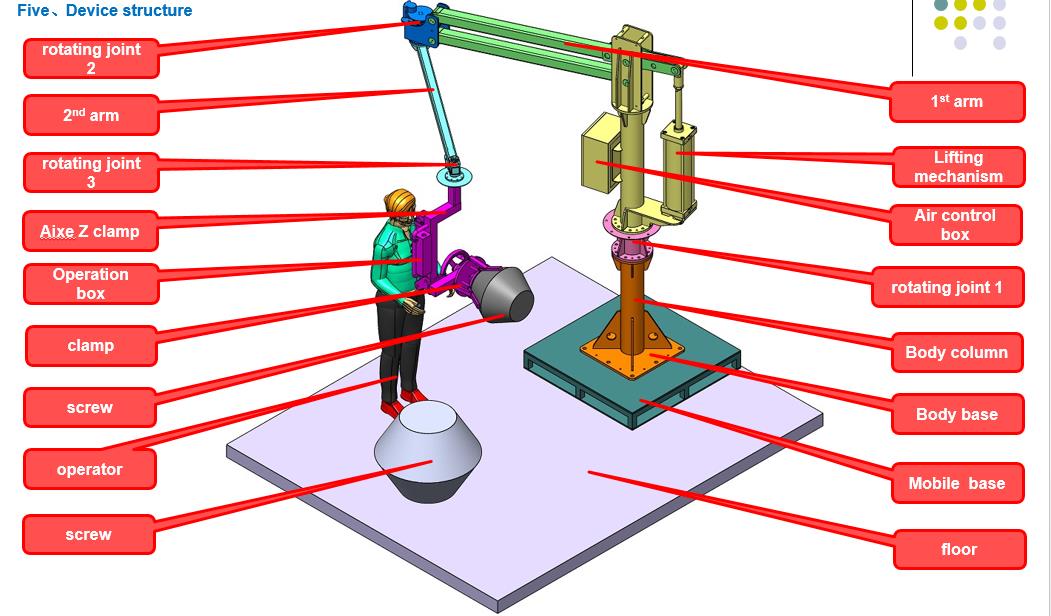
Ин дастгоҳи ёрирасони манипулятор аз пойгоҳи собит, сутуни бадан, кантилвери муштарак, механизми бардоштан, тазиқи Z-меҳвар, дастаки корӣ ва дигар қисмҳои механикӣ иборат аст. Оператор манипуляторро, ки бо кувваи электр таъмин карда мешавад, ба электроди графитй мебарад. Оператор барои гирифтани винти электроди графитӣ тазиқи манипулятори бо қувваи барқро ба замин мекӯчонад. Пас аз гирифтани он ба бандари риштаи электроди графитӣ интиқол дода мешавад, 90 дараҷа чарх мезанад ва кормандон риштаҳои винтро барои васлкунӣ мустаҳкам мекунанд. Дар муқоиса бо коркарди дастӣ, ин таҷҳизот дорои қувваи сабуктари корӣ, суръати тезтар, сохтори оддӣ, сатҳи пасти нокомӣ, нигоҳдории осон ва арзиши пасти нигоҳдорӣ мебошад. Он принсипи тавозуни қувваро татбиқ мекунад, то ба оператор имкон диҳад, ки ашёҳои вазнинро тела диҳад ва кашад. Он метавонад дар фазои мувофиқ мутавозин ҳаракат ва ҷойгир карда шавад, махсусан барои коркард ва паллетизатсияи қисмҳои корӣ бо талаботи дақиқи ҷойгиркунӣ ё васлкунӣ мувофиқ аст. Онҳо аз ҷониби соҳаҳои гуногун барои кам кардани ҷароҳатҳои пушти оператор ва хастагӣ, ҳангоми баланд бардоштани самаранокӣ ва сифати истеҳсолот истифода мешаванд. Манипуляторҳо ва лавозимотҳо фармоишӣ тарҳрезӣ ва истеҳсол карда мешаванд.
Корпуси манипулятор аз профилҳои пӯлоди карбон сохта шудааст. Ба руи он хокаи электростатикй пошида, дар харорати баланд пухта мешавад. Он назар ба рангкунии дорупошӣ аз ҷиҳати экологӣ тозатар, зеботар ва ба зангзанӣ тобовартар аст. Системаи назорат як клапани механикии тугма + комбинатсияи гузаришро қабул мекунад, ки кор кардан осон ва дар фаҳмидан устувор аст. Сатҳи тамос бо маҳсулот аз маводи ғайриметаллӣ барои муҳофизат кардани маҳсулот сохта шудааст.
Оператор як борбардорро барои тела додани манипулятори бо қувваи барқ ба майдони васлкунии электроди графитӣ барои мустаҳкам кардан истифода мебарад, тазиқи манипулятори бо қувваи барқро дар болои винт дар замин ҷойгир мекунад, тазиқи онро мегузорад, манипуляторро идора мекунад, то винтро тавассути тугмаҳо пахш кунад, онро ба паҳлӯи сӯрохи риштаи электроди графитӣ интиқол медиҳад, тазиқи онро мегардонад, электродро ҳамвор созад ва онро гузоред, пас оператор тазиқи грепперро дастӣ мегардонад, то винтро бо электроди графит маҳкам кунад. Пас аз қулф кардан, кликро бо тугма кушоед, то винтро кушоед, тазиқи онро ба замин аз болои винт боз кунед, тазиқи винтро гардонед ва сипас ба электроди графитии навбатӣ гузаред, то монтажи қулфро оғоз кунед…
Вақти интишор: октябр-11-2023




{kind=link}