
Маҳсулот

қуттии картонї gantry palletizer худкор
Тавсифи кӯтоҳ:
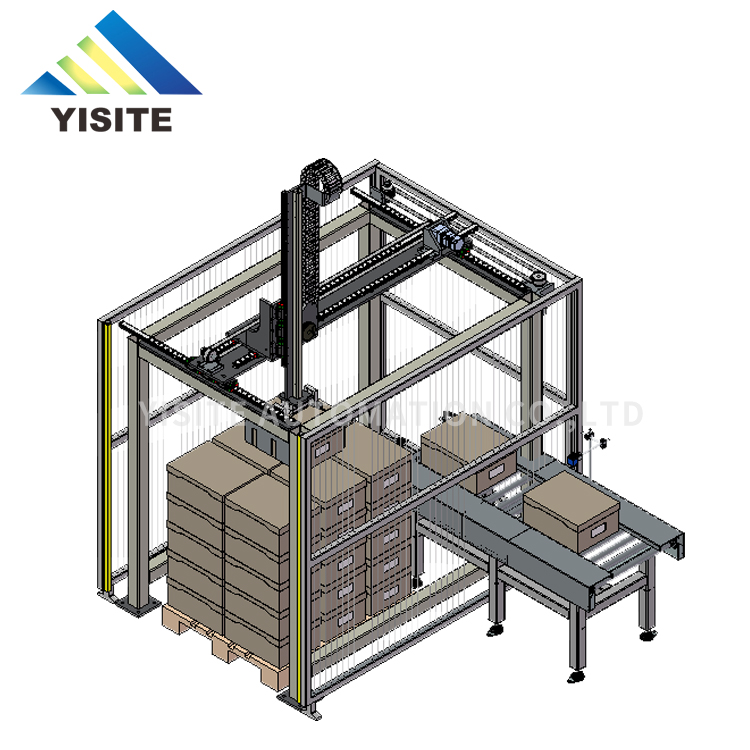
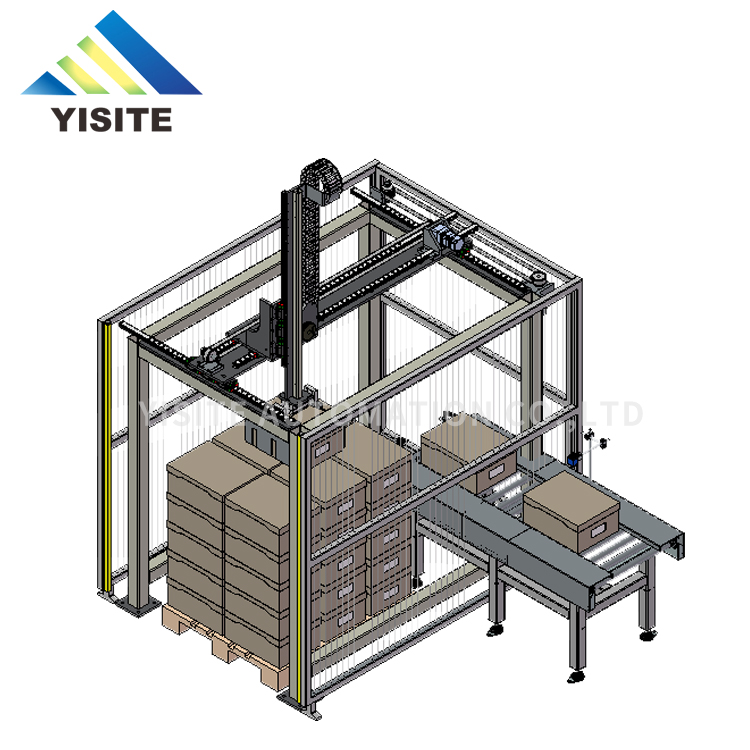
Муқаддимаи маҳсулоти қуттии картонӣ паллетизатори автомобилӣ: Воҳиди асосии паллетизатор аз аробачае иборат аст, ки метавонад ба пеш ва ақиб ҳаракат кунад, чаҳорчӯба ва платформаи интиқолдиҳанда, ки онро боло ва поён бардоштан мумкин аст. Андоза ва асбобро метавон фармоиш дод.
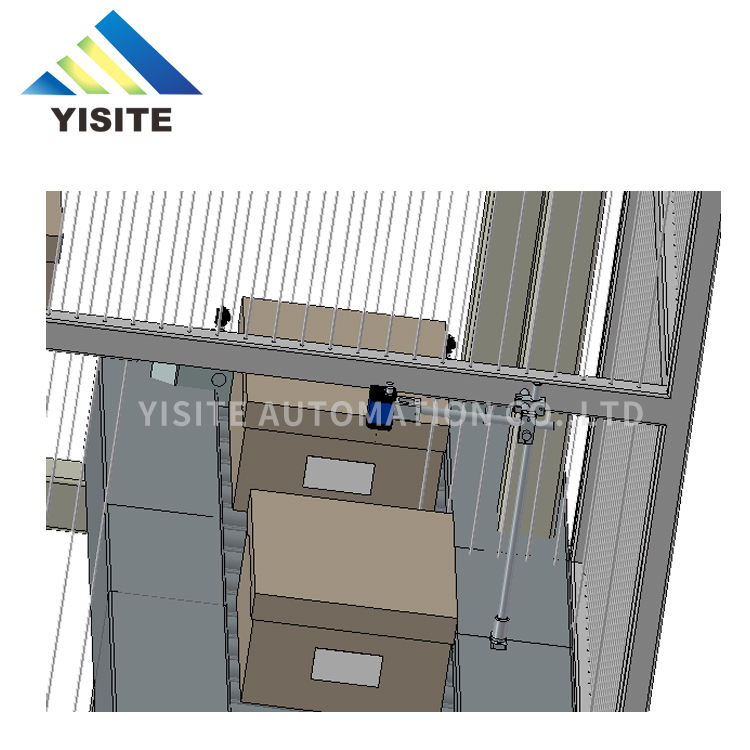
паллетизатори худкори қуттии картонӣ бо тарҳи махсуси чанголи пневматикӣ, фишори танзимшаванда, ки бо клапани буферии фишор муҷаҳҳаз шудааст, то ки амали дарк бо механизми индуксионӣ муҷаҳҳаз карда шавад, метавонад ба таври худкор объектро дарк кунад ва ба маркази идоракунӣ барои гирифтани объект хабар диҳад.

дар бораи мо

Мо як истеҳсолкунандаи касбии таҷҳизоти автоматикунонии фармоишӣ ҳастем. Маҳсулоти мо депаллетизатор, мошини борпечкунии чинӣ ва ҷойгиркунӣ, паллетизатор, замимаи ҳамгироии роботҳо, манипуляторҳои боркунӣ ва борфарорӣ, ташаккули картон, мӯҳри картон, диспенсери паллет, мошини парпечкунӣ ва дигар ҳалли автоматизатсия барои хати истеҳсоли бастабандиро дар бар мегирад.
Майдони заводи мо кариб 3500 мураббаъметр аст. Гурӯҳи асосии техникӣ таҷрибаи миёнаи 5-10 сол дар автоматикунонии механикӣ, аз ҷумла 2 муҳандиси конструктори механикӣ дорад. 1 муҳандиси барномасозӣ, 8 коргари васлкунӣ, 4 шахси ислоҳкунандаи пас аз фурӯш ва дигар 10 коргар
Принсипи мо "аввал мизоҷ, аввал сифат, аввал обрӯ" аст, мо ҳамеша ба мизоҷони худ дар "афзоиши иқтидори истеҳсолӣ, кам кардани хароҷот ва беҳтар кардани сифат" кӯмак мерасонем, ки мо саъй мекунем, ки таъминкунандаи беҳтарин дар соҳаи автоматикунонии мошинсозӣ гардем.
Truss XYZ манипулятори stacking bos картон пурра худкор
1. Таркиби мошини stacker
Мошини паллетизатсия аз чаҳорчӯбаи насбкунӣ, системаи ҷойгиркунӣ, системаи гардонандаи серво, системаи назорат, системаи назорат ва тақсимоти барқ, дастгоҳи муҳофизати бехатарӣ ва ғайра иборат аст, ки бо системаи ҷойгиркунии автоматии ғизо муҷаҳҳаз шудааст. (Системаи ихтиёрии автоматии таъминоти стек)
2. Рақаи васлкунии мошини stacking
Азбаски суръати ҳаракати stacker хеле зуд аст, ҳолати ибтидоӣ дорад, таъсири бузург оид ба монтажи frame.The чорчӯбаи насб бояд хеле хуб сахтгирона барои таъмини фаъолияти мӯътадили stacking бошад, бинобар ин мо сохтори чаҳорчӯбаи пӯлоди кафшер тарҳрезӣ кардаанд, ҳамчун чаҳорчӯбаи дастгирӣ.
3. Системаи ҷойгиркунии мошини Stacker palletizer
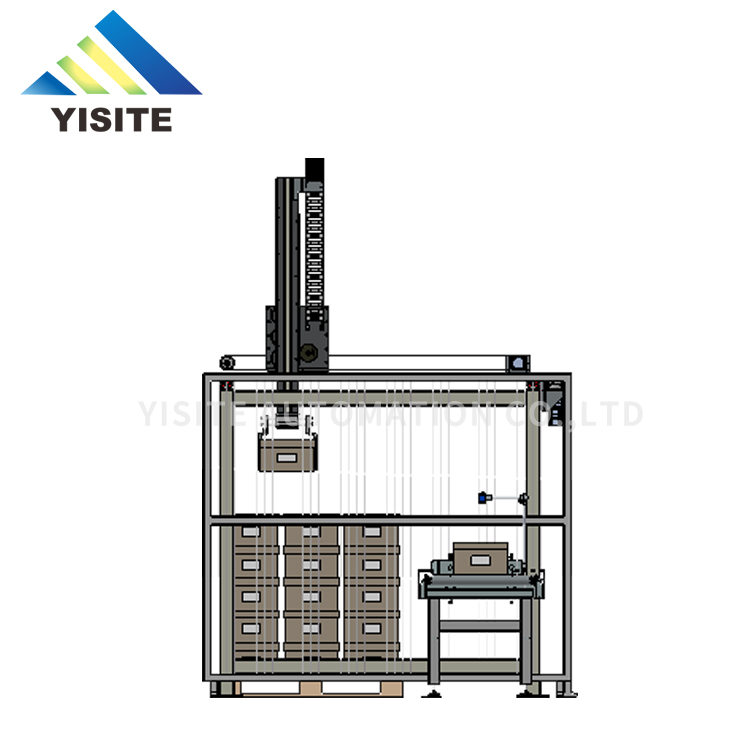
Системаи ҷойгиркунии stacker асосии тамоми таҷҳизот буда, маҳсулоти ширкати Yaskawa (Ҷопон) мебошад, суръати ҳаракати тез ва дақиқии такрор баланд аст, X, Y, Z се координата барои интиқоли камарбанди дандонҳои синхронӣ интихоб карда мешаванд, координати ягона дақиқии ҷойгиркунии такрорӣ 0,1 мм, суръати ҳаракати хати зуд: 1000 мм / с. Меҳвари X як системаи ҷойгиркунии ягона бо дарозии ягонаи 3000 мм ва фосилаи 1935 мм мебошад. Интиқолдиҳандаи синхронӣ ҳаракати синхронии ду системаи ҷойгиркуниро таъмин мекунад ва бо муҳаррики серво 1500 Вт идора мешавад. Барои мувофиқ кардани моменти ронандагӣ ва инерсия, редуктори фишанги сайёраи дақиқ мавҷуд аст.
Меҳвари Y бо истифода аз системаи ҷойгиркунии дугона. Сабаби он, ки воҳиди ҷойгиршавӣ бо чунин салиб калон асосан аз он иборат аст, ки меҳвари Y як дастгирии дутарафа бо сохтори таваққуфи миёна мебошад. Агар буриши интихобшуда кофӣ набошад, устувории ҳаракати робот кафолат дода намешавад ва робот ҳангоми ҳаракат бо суръати баланд меларзад. Ду воҳиди ҷойгиркунӣ паҳлӯ ба паҳлӯ истифода мешаванд, то меҳвари Z-ро дар мобайн ва мувозинат буред. бори хуб. Ин режими насбкунӣ дорои устувории хеле хуб аст. Ду системаи ҷойгиркунӣ аз ҷониби як муҳаррики серво 1500W идора карда мешавад, ки бо редуктори фишанги сайёраи дақиқ барои мувофиқ кардани моменти гардонанда ва инерсия муҷаҳҳаз шудааст.
Системаи мавқеъгирии Z-меҳвари устувор ва устувор аст. Маҳсулот дар маҷмӯъ дорои слайдер собит ва ҳаракати умумии боло ва поён мебошад. Моторҳои серво бояд объектро зуд такмил диҳанд, ки он бояд вазнинии бузург ва қувваи шитобро бартараф кунад ва ба нерӯи бештар ниёз дорад. .Дар амал, мо муҳаррики серво 2000W-ро интихоб кардем, ки бо редуктори фишанги сайёраи дақиқ муҷаҳҳаз шудааст. Меҳвари A меҳвари гардиш аст.
4. Системаи гардонандаи серво
Мошини манипулятори stacking бо истифода аз муҳаррики серво бо функсияи рақамӣ. Ҳар як чоҳи мотор бо мотори серво ва редуктор, чор мотори серво ва чаҳор редуктор, аз ҷумла муҳаррики амудӣ бо мотори серво қулф муҷаҳҳаз шудааст.
5. Дасти stacker
Стеке бо тарҳи махсуси чанголи пневматикӣ, фишори танзимшаванда, ки бо клапани буферии фишор муҷаҳҳаз шудааст, то ки амали дарк бо механизми индуксионӣ муҷаҳҳаз шудааст, метавонад ба таври худкор объектро дарк кунад ва ба маркази идоракунӣ барои гирифтани объект хабар диҳад.
6, системаи назорат
Системаи идоракунӣ аз як PLC калон ва экрани сенсорӣ иборат аст. Система дорои қобилияти барномасозии пурқувват аст. Бо моделҳои гуногуни паллетизатсия, система метавонад барномаҳои гуногуни артефактро пешакӣ муқаррар кунад ва барои иваз кардани барномаи мувофиқ дар экрани сенсорӣ кор кардан мумкин аст.
7, дастгоҳи бехатарӣ
Мошин дорои функсияи фаврии хато ва ҳушдор мебошад ва ҳар як хато метавонад ҷойгиршавии мушаххасро дақиқ инъикос кунад, ба осонӣ ва зуд бартараф кардани камбудиҳо, аз ҷумла: функсияи муҳофизат аз бархӯрди робот; насби қисмҳои корӣ дар ҷои муайян; ҳифзи бехатарии экрани нур.
Параметрҳои техникӣ
1. Модели мошин: YST-MD1500
2. Иқтидори stacking: 200-500 қуттиҳои / H
3. Чорчӯба: SS41 (табобати пластикии тазриқӣ аз пӯлоди A3) чоҳи S45C пӯлоди подшипник
4. Қувваи барқ: AC, 3 марҳила, 380V, 9KW 50HZ
5. Истеъмоли ҳаво: 500NL / MIN (истифодаи ҳаво: 5-6кг / см2)
6. Андозаҳои таҷҳизот: (L) 3500mm (W) 2250mm (H) 2800mm (вобаста аз тарҳи тарҳбандии воқеии)
7. Вазни таҷҳизот: 1500 кг


Конфигуратсияи афзалиятҳои асосӣ
1. Моторҳои серво тамгаи Yaskawa
2. Коҳиши суръати бренди Тайван
3. Mitsubishi (Ҷопон) PLC
4. Дар Шнайдер контактор ва коммутаторҳо истифода мешаванд
5. Датчики фотоэлектрикии Omron
6. Амали намоиши идоракунии интерфейс ва ҳолати ҳушдор ва функсияи ҳушдор
7. Табдилдиҳандаи басомади бренди Yaskawa
8. Чорчӯба ва панелҳои паҳлӯ аз пӯлоди карбон сохта шудаанд
9. Унсурҳои пневматикии Тайван AirTac
10. Бренди PIAB итолиёвии Sucker









